Conclude all of our discussions, we designed our robot Skylark for FTC 2014-2015 competition.
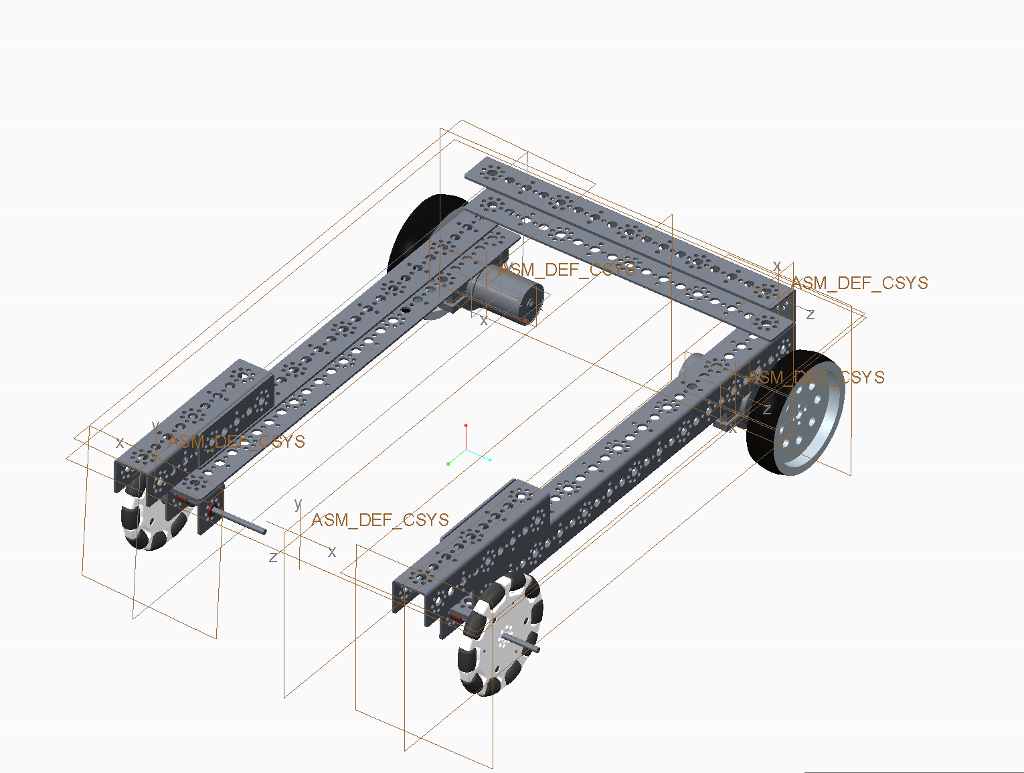
• The robot has a base for driving around, powered by two 9 volt DC motors along with encoders for autonomous programming need.
• Skylark has a sweeper that powered by a DC motor to sweep the balls in to the cylinder
• Skylark has two lifts, an arm, a cylinder and a releasing gate ball lifting and releasing to lift the balls up and release the balls on top of the rolling goal
• Skylark also has a pull arm to hook up the rolling goal so that he can drag it around.
• Skylark has a pole for all the controllers, it is easy to access. The Samantha module was placed on the tip of the pole.
• The robot has a base for driving around, powered by two 9 volt DC motors along with encoders for autonomous programming need.
• Skylark has a sweeper that powered by a DC motor to sweep the balls in to the cylinder
• Skylark has two lifts, an arm, a cylinder and a releasing gate ball lifting and releasing to lift the balls up and release the balls on top of the rolling goal
• Skylark also has a pull arm to hook up the rolling goal so that he can drag it around.
• Skylark has a pole for all the controllers, it is easy to access. The Samantha module was placed on the tip of the pole.









 RSS Feed
RSS Feed
